가속도센서 기반의 드론 고도 측정 알고리즘 개발
논문 정보
- 제목: A Development of on Altitude Measurement Algorithm for Drone by Accelerometer
- 저자: 윤보람, 이성희, 이우진 (경북대학교 컴퓨터학부, 소프트웨어기술연구소)
- 학회/저널: 2017년 춘계학술발표대회 논문집 제24권 제1호
- 발행일: 2017-04
- 주요 연구 내용: 가속도 센서만으로 정확한 고도를 측정하기 위해 중력 가속도 제거, 저역 통과 필터, 드론의 비행 상태(초기 이륙, 호버링)에 따른 가속도 보정 알고리즘을 제안함.
- 주요 결과 및 결론: 제안된 알고리즘 적용 시 기존 방법 대비 고도 유지 구간에서의 오차율이 약 40~60%에서 7%로, 최고 고도 시점의 오차율이 20%에서 5%로 대폭 감소함.
- 기여점: 고가나 고중량의 추가 센서(LiDAR, GPS 등) 없이 가속도 센서 단독으로 적분 오차 누적 및 진동 문제를 해결하여 경제적이고 효율적인 고도 측정 방안을 제시함.
요약
초록
드론의 고도 유지를 위해서는 정확한 고도 측정이 필수적이다. 가속도 센서는 반응이 빠르지만 적분 오차가 누적되어 값이 발산하는 문제가 있고, 기체 진동을 고도 변화로 오인할 수 있다. 이를 해결하기 위해 기존에는 GPS나 LiDAR 등을 추가했으나 이는 비용과 무게를 증가시킨다. 본 논문은 추가 장치 없이 가속도 센서만을 이용하여 드론의 비행 특성(진동, 이륙 상태 등)을 고려한 고도 측정 알고리즘을 제안하며, 실험을 통해 정확성이 향상됨을 입증한다.
서론
드론의 활용 범위가 확대됨에 따라 실내외에서의 안정적인 고도 유지 비행이 중요해졌다. 고도 측정을 위해 주로 사용되는 가속도 센서는 가속도를 적분하여 거리를 구하는 과정에서 오차가 누적되는 한계가 있다. 상용 드론은 기압계를 보조로 사용하지만, 기압계는 프로펠러 바람이나 온도 등 환경적 요인에 민감하여 정밀성이 떨어진다. 본 연구는 가속도 센서의 적분 오차 누적 문제와 드론 진동에 의한 노이즈를 소프트웨어적으로 보정하여, 단일 센서만으로 정확한 고도를 측정하는 것을 목표로 한다.
배경
기존 연구에서는 IMU, 카메라, LiDAR를 융합하거나 GPS와 기압계를 결합하는 방식이 사용되었다. 그러나 카메라는 연산량이 많고, LiDAR는 고도 제한이 있으며, GPS는 실내 사용이 불가능하다는 단점�이 있다. 또한 보행자 이동거리 측정에 사용되는 가속도 센서 보정 기법은 수평 이동에 초점이 맞춰져 있어 수직 운동을 하는 드론에 그대로 적용하기 어렵다. 따라서 드론의 특성에 맞춘 경량화된 고도 측정 알고리즘이 필요하다.
모델 아키텍처 / 방법론
-
기본 필터링: 가속도 센서 데이터에서 중력 가속도를 제거하고 선형 가속도만을 추출한다. 이때 저역 통과 필터(Low Pass Filter)를 사용하여 고주파 성분의 진동 노이즈를 제거한다. 필터링 수식은 다음과 같다. (: 필터링된 선형가속도, : 가중치, : 측정된 가속도)
-
드론 비행 특성 기반 알고리즘:
- 초기 이륙 감지: 드론이 실제 이륙하기 전 진동으로 인해 고도가 계산되는 것을 방지하기 위해, 사용자의 스로틀(Throttle) 입력 신호를 확인하여 이륙 시점부터 고도 계산을 시작한��다.
- 고도 유지 상태 판단: 연속된 선형 가속도 값을 분석하여 고도 유지 상태인지 판단한다.
- 오차 보정:
- 고도 유지 상태라고 판단되면 속도 적분 오차 누적을 방지하기 위해 속도에 가중치를 적용한다.
- 비행 중 발생하는 비정상적인 진동 값을 무시하기 위해 평균 가속도의 범위를 제한한다.
- 최종적으로 보정된 평균 가속도를 이용하여 고도를 계산한다.
실험 결과
- 실험 환경: 자체 제작한 쿼드콥터를 이용하여 실내 비행 테스트를 수행하였으며, 고도 유지 상태 및 상승 후 하강 시나리오를 테스트했다.
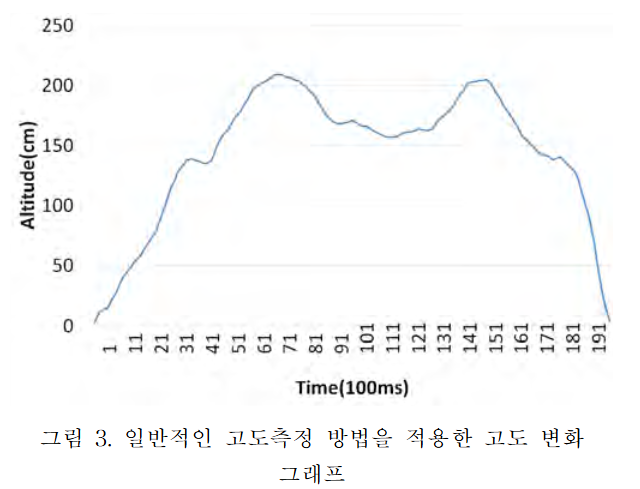
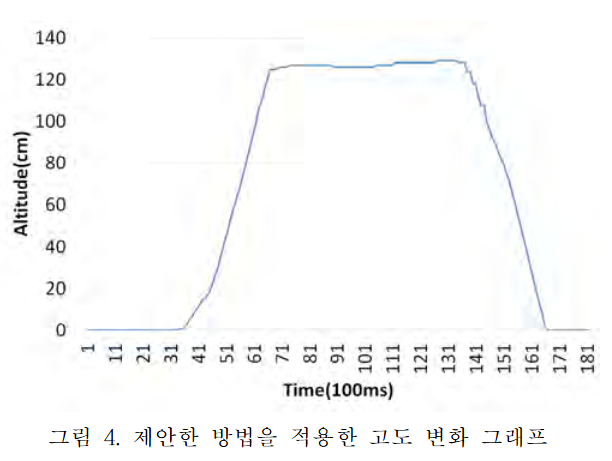
- 고도 유지 구간 성능:
- 기존 방법: 실제 고도 130cm에서 측정값이 157
209cm로 분포하며 약 4060%의 오차율을 보임. - 제안 방법: 실제 고도 120cm에서 측정값이 125~129cm로 분포하며 약 7%의 오차율로 대폭 개선됨.
- 기존 방법: 실제 고도 130cm에서 측정값이 157
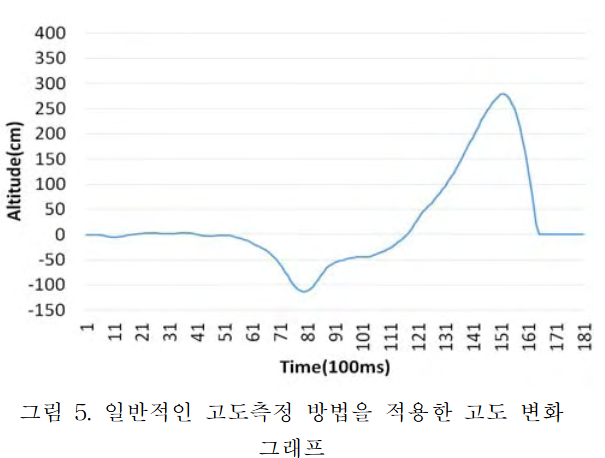
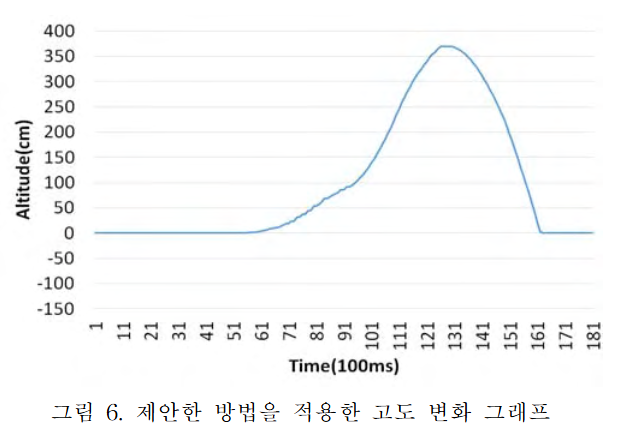
- 최고 고도 측정 성능:
- 기존 방법: 실제 고도 350cm 상승 시 277cm로 측정되어 약 20%의 오차율 발생.
- 제안 방법: 실제 고도 350cm 상승 시 370cm로 측정되어 약 5%의 오차율 기록.
- 비교 결과: 논문의 그래프(Figure 3, 4, 5, 6) 비교를 통해 제안된 알고리즘이 적분 오차 누적을 효과적으로 억제하고 실제 고도와 유사한 궤적을 그림을 확인하였다.
결론
본 논문은 드론의 비행 특성을 고려하여 가속도 센서의 고질적인 문제인 적분 오차 누적과 진동 노이즈를 해결하는 알고리즘을 제안하였다. 추가적인 센서 장착 없이 소프트웨어적인 처리만으로 고도 측정 오차율을 기존 40% 대에서 한 자릿수 대(약 5~7%)로 감소시키는 성과를 보였다. 향후 이 알고리즘을 활용한 정밀한 고도 유지 제어 기법에 대한 연구가 진행될 예정이다.